Zerun Wang
I build robots that
Electrical engineering student focused on robotics, embedded systems, and embodied AI. Currently working on soft robotic sensing research, legged locomotion, and rocket avionics at Georgia Tech.

Projects
GT RoboRambler — Sentry Robot Autonomy
Software Team Lead for GT RoboRambler's RoboMaster competition team — architected a BehaviorTree autonomous decision system, chassis power regression, and a LiDAR/AprilTag localization pipeline for the Sentry Robot.
Yellow Jacket Space Program — Hopper Rocket Avionics
Avionics Responsible Engineer for a student-built hopper rocket — simulated roll control in Simulink and developed avionics software for a subscale LOX electric pump.
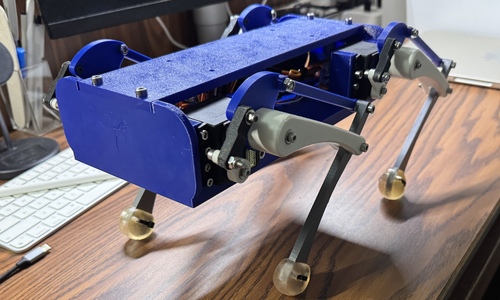
Quadruped Robot
A fully 3D-printed 8-DOF quadruped robot with inverse kinematics, custom PCB, and IMU-based balance control — winner of 1st place at the 2026 GT IEEE RoboTech Hackathon, now training PPO locomotion policies in MuJoCo.
Skills
Software
Robotics & Control
Hardware
Get In Touch
Open to research collaborations, internships, and robotics conversations.